Research

Autonomous Robotics
Design of autonomous robotic systems capable of perceiving, navigating, and adapting in complex environments, with a focus on frugal, robust, and efficient intelligence across multiple robotic platforms, from single-agent to collective and swarm systems .

Natural and Artificial Vision
Study of visual perception in biological and artificial systems, from insect vision to machine perception and computer vision, with a focus on active vision, optic flow, visual memories, and sensory strategies for navigation and interaction in complex environments.
Neuromorphic Engineering
Development of biologically inspired sensory and computational systems for robotics, including event-based vision, sparse neural architectures, spiking network, and low-power embedded intelligence for perception, navigation, and decision-making.
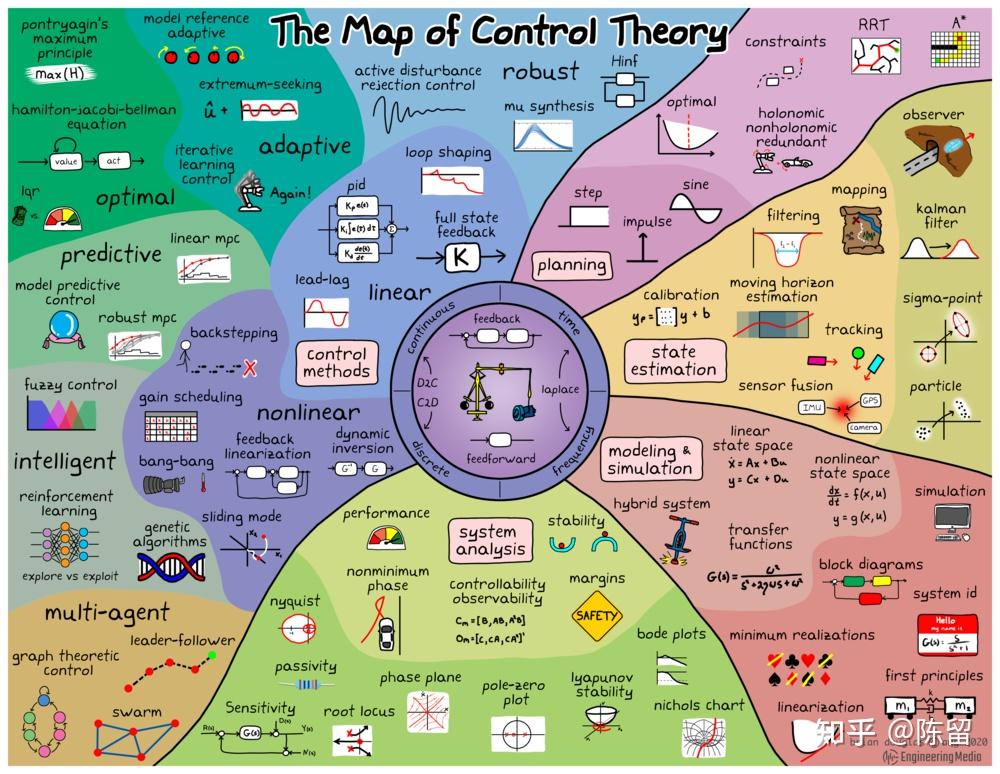
Control Theory
Development and mathematical analysis of dynamical feedback control systems for autonomous robots, including stability, guidance, visual servoing, and sensorimotor regulation under uncertainty.

Computational Neuroscience
Development of computational models of neural systems grounded in connectomics data to understand how biological circuits encode perception, memory, and decision-making, and to reproduce these principles in autonomous and explainable artificial intelligence systems.

Ethology
Study of animal behavior in ecological contexts, with a focus on insect navigation, route learning, adaptation, and natural decision-making.